La NASA ha publicado imágenes impresionantes del aterrizaje del rover Perseverance en Marte.
A finales de la semana pasada ya pudimos ver una increíble imagen en la que se podía ver el aterrizaje del rover sobre Marte, tomada durante la etapa de descenso. Ahora, la NASA ha hecho algo mucho mejor, publicando el vídeo del aterrizaje del pasado 18 de febrero desde las diferentes cámaras que lo grabaron.
Dave Gruel, responsable de la cámara Perseverance EDL del Jet Propulsion Laboratory de la NASA, explicó cómo fue el proceso. Su equipo tenía que asegurarse de que las cámaras “no dañasen” al módulo de descenso o al rover, pero que consiguieran sacar valiosas imágenes. El sistema EDL (Entrada, Descenso y Aterrizaje) logró capturar 30 gigabytes de datos y sacar hasta 23.000 imágenes mientras el rover descendía hacia la superficie del planeta rojo.
Tres cámaras estuvieron grabando el descenso, aunque una de ellas murió cuando se desplegó el paracaídas, dijo Gruel (las dos restantes siguieron funcionando). También se colocaron otras dos cámaras en el vehículo, una mirando hacia arriba y la otra mirando hacia abajo. Desafortunadamente, el micrófono adjunto no pudo grabar audio durante el descenso.
Afortunadamente, el dispositivo sí logró capturar audio desde el suelo, convirtiéndose así en los primeros sonidos registrados de Marte con un micrófono adecuado para la ocasión.
El video comienza con el despliegue del paracaídas supersónico, que consiguió ralentizar el descenso del vehículo hasta unos 1.609 km/h. Al ver el video, “se puede ver realmente cómo de violento fue el despliegue del paracaídas”, explicó Al Chen, líder del EDL Perseverance EDL, durante una conferencia de prensa. El paracaídas tardó solo siete décimas de segundo en desplegarse, dijo Chen.
Las imágenes también muestran la expulsión del escudo térmico, que protegió al rover durante la entrada en la atmósfera. Chen dijo que un muelle responsable de apartar el escudo térmico parecía haberse soltado. No representaba ningún peligro para la nave espacial, pero era algo con lo que el equipo Mars 2020 no contaba.
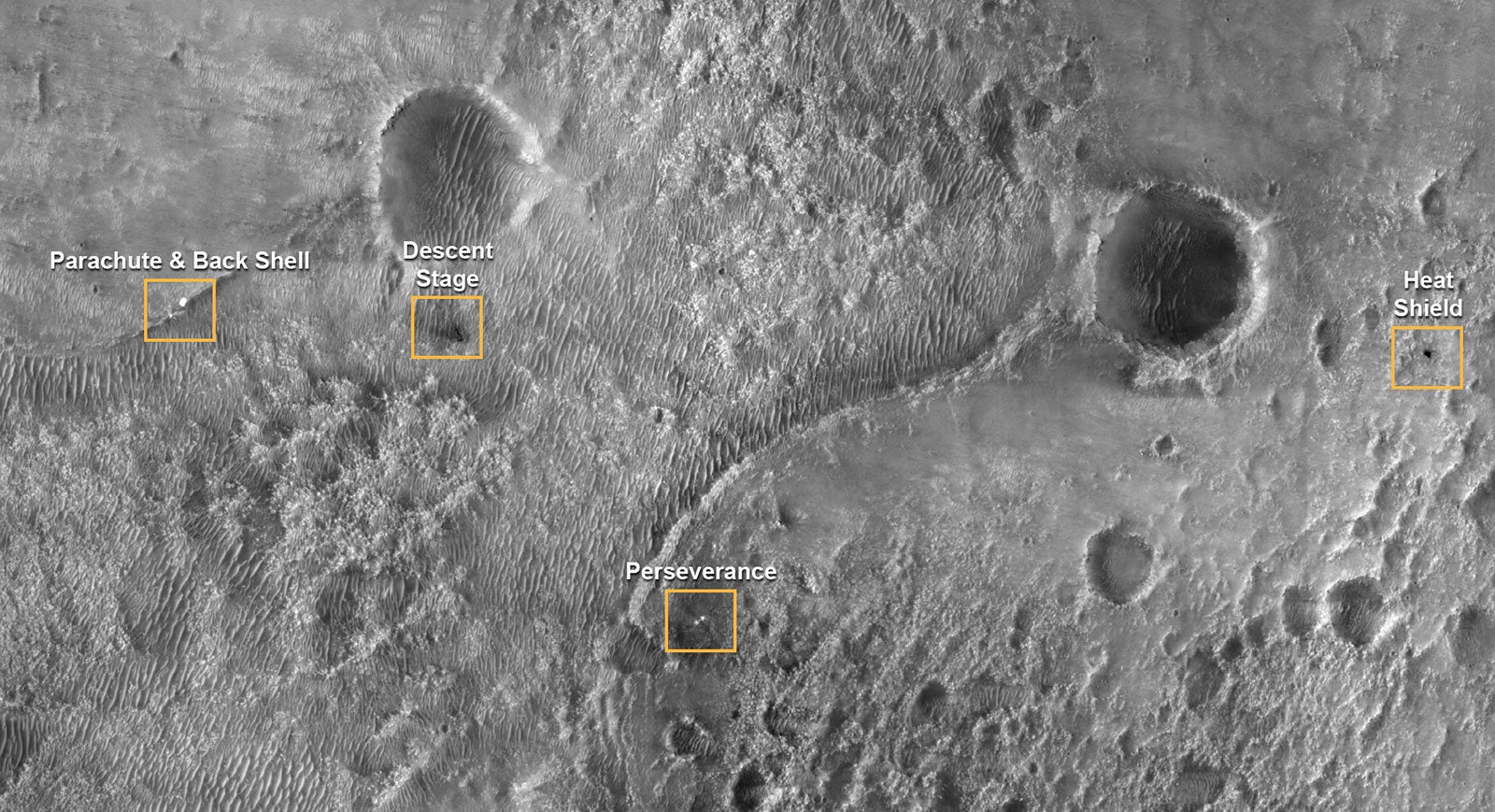
Se puede ver al rover balanceándose hacia adelante y hacia atrás bajo el paracaídas mientras desciende. La maniobra “skycrane” dio comienzo cuando el rover estaba a unos 20 metros sobre la superficie. No se pueden ver columnas visibles ni humo saliendo de los cohetes. Eso se debe a que el sistema funciona con un propulsor de hidracina, que emite nitrógeno e hidrógeno y ambos gases son transparentes, explicó Chen.
Los momentos finales del video muestran los cables bajando el rover hacia la superficie. De hecho, puedes ver las patas y las ruedas de Perceverance colocándose en posición de aterrizaje. Una vez depositado sobre la superficie, los cables se sueltan y el módulo de descenso vuela de nuevo para estrellarse en la distancia.
“Me pone la piel de gallina cada vez que lo veo”, dijo Gruel.
Ken Williford, científico adjunto del proyecto Perseverance, dijo que le emocionaba ver estas imágenes desde una perspectiva científica, y afirmó que las imágenes de la cámara EDL mostraban una “estratigrafía preciosa” cerca del lugar de aterrizaje.
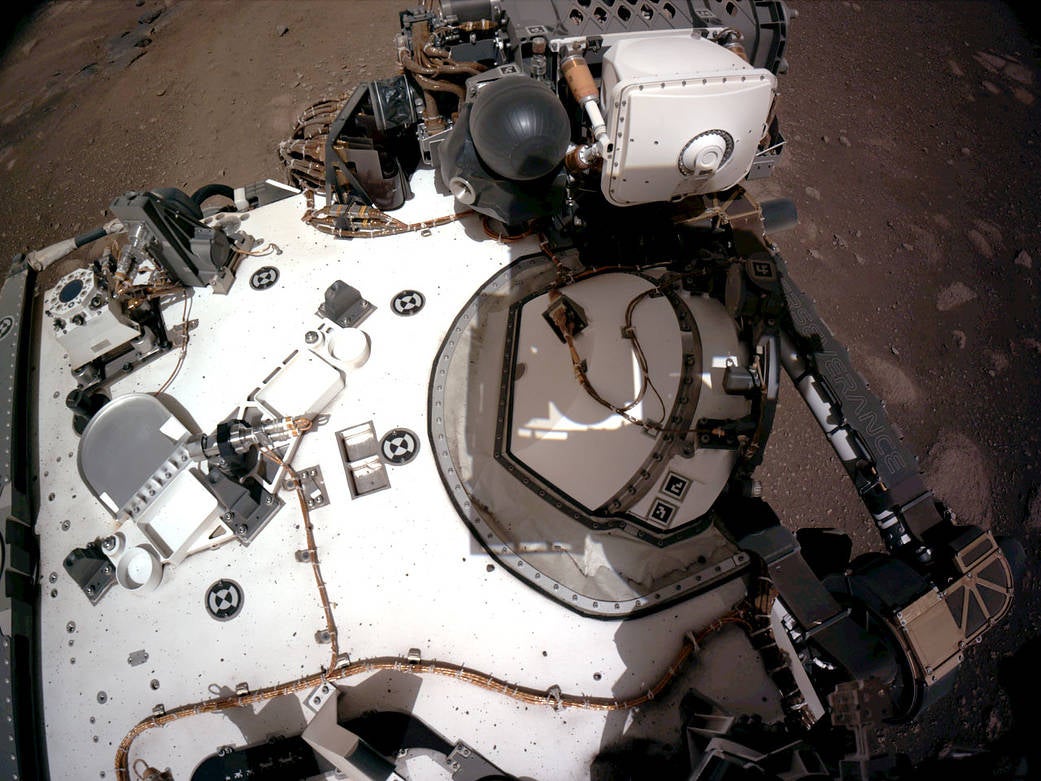
Durante la rueda de prensa, Justin Maki, científico de imágenes del Perseverance y jefe del equipo de operaciones de instrumentos, proporcionó nuevos datos sobre el rover y su despliegue. El equipo logró desplegar el mástil de detección remota de Perseverance, que está equipado con una serie de instrumentos, incluidas las cámaras de navegación izquierda y derecha del rover.
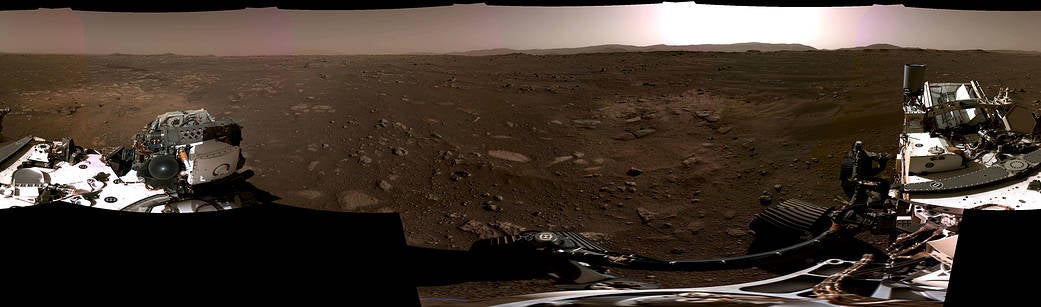
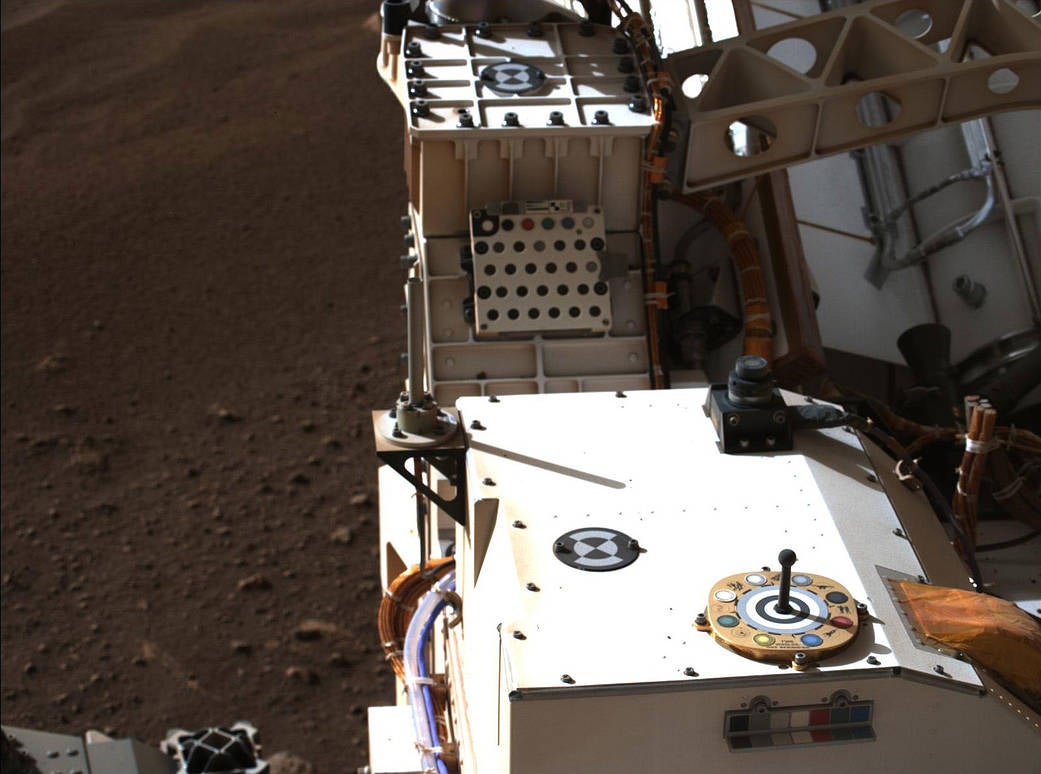
El equipo tomó algunas fotos con las cámaras de navegación que acaban de ser implementadas, mostrando el extraordinario poder de estas cámaras en color de alta resolución. Las imágenes publicadas mostraban el lugar de aterrizaje, la cubierta del rover (que tenía todavía algunos restos de polvo del aterrizaje) y las ruedas del rover. También probaron el Mastcam-Z del rover, un nuevo instrumento de misión, que mostró a la perfección la cubierta del rover y el objetivo de calibración.
La NASA ha publicado imágenes sin procesar de la misión Mars 2020, que puedes ver aquí.
Jessica Samuels, manager de la misión de superficie del Perseverance, dijo que el rover tiene un estado “saludable” y que ya han logrado ejecutar hasta 5.000 comandos, dijo.
El drone Ingenuity, actualmente conectado a la panza del rover, también consiguió recargar sus baterías con éxito. Desplegar el pequeño helicóptero será una de las primeras tareas de Perseverance, algo que debería tener lugar dentro de un par de meses.
Solo llevamos cuatro días desde su llegada y ya nos ha mostrado algunas de las imágenes más extraordinarias que jamás hayamos visto. ¡Que queden muchas más por venir!