El 19 de enero de 2024 un explorador pequeño de forma esférica llamado SORA-Q llegó a la Luna y se abrió, desplegando dos mitades con ruedas a cada lado. Este robot en miniatura, que cabría en la palma de tu mano, rodó por la superficie de la Luna durante casi dos horas, tomando imágenes y transmitiendo datos a la Tierra. Su corta vida útil ayudará con información a diseñara una flota de diminutos exploradores capaces de entrar en áreas difíciles que para sus contrapartes más grandes son inaccesibles.
Un nuevo estudio detalla los resultados de lo que el SORA-Q hizo en la Luna, y de allí surgen los desafíos que encontró a lo largo de su misión, con lecciones que sirven para el futuro diseño de robots espaciales de tamaño reducido. El trabajo se publicó el miércoles en Science Robotics y sugiere que los exploradores pequeños podrían servir como ayuda a las misiones más flexibles y robustas, eficientes en materia de costos, para la exploración de la Luna y otros cuerpos celestes.
La historia de SORA-Q
Para la creación del robot Lunar transformable la Agencia de Exploración Aeroespacial de Japón (JAXA) se asoció con investigadores de la Universidad de Doshisha, Sony, y TakaraTomy. La compañía japonesa de juguetes, Tomy, puede no tener experiencia en la exploración del espacio, pero se la conoce por haber creado los primeros juguetes Transformer a principios de la década de 1980.
Esta inusual asociación dio lugar a SORA-Q, cuyo nombre oficial es Vehículo de Excursión Lunar 2. El pequeño robot se transforma para poder recorrer el tan variado terreno lunar. SORA-Q llegó a la superficie de la luna a bordo del SLIM (Smart Lander for Investigating Moon) de la JAXA.
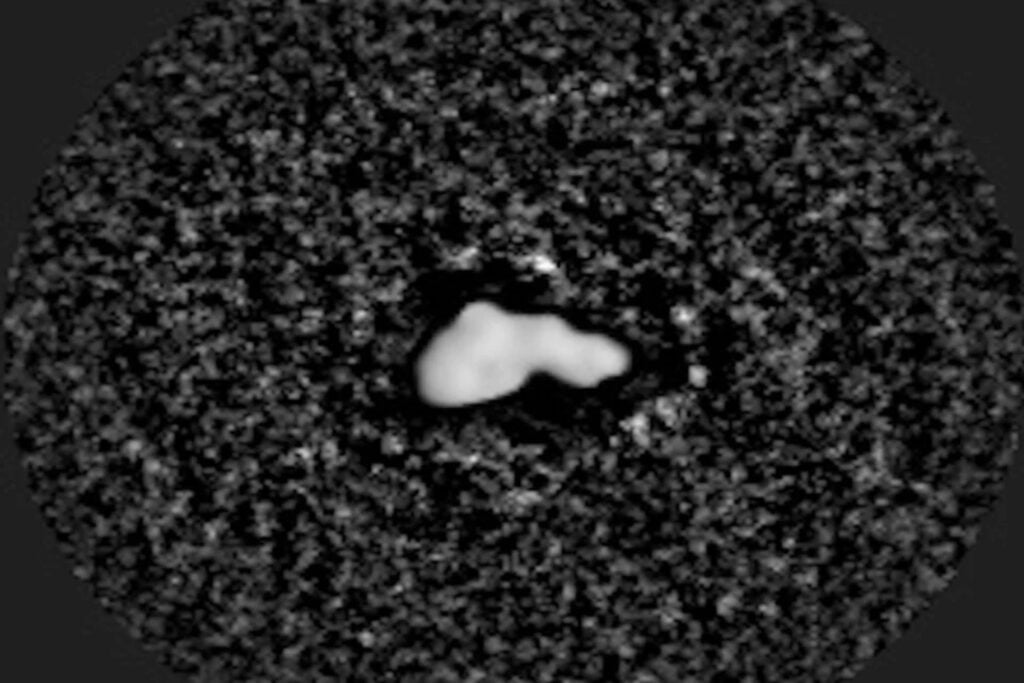
Debido a un fallo de los propulsores, el SLIM terminó tumbado sobre la superficie lunar, con lo que su misión se frustró. Pero el diligente robot pequeñito, SORA-Q, captó una imagen del alunizador con sus paneles solares enfrentando el lado equivocado, y la JAXA pudo así diagnosticar en qué condiciones se encontraba el SLIM.
El SORA-Q operó sobre la superficie lunar durante 100 minutos, captando una serie de imágenes de sus condiciones después del alunizaje, y su entorno. Envió los datos a la Tierra utilizando a su compañero, el Vehículo de Excursión Lunar (LEV) 1.
El diminuto explorador lo logró
El SORA-Q medía solo 80 milímetros de ancho, con un peso de 250 gramos. Su diseño compacto y liviano se basó en conceptos que suelen utilizarse en el diseño de juguetes, incluyendo los mecanismos de transformación y rotaciones de ruedas fuera de eje que permiten que se transforme en robot y en vehículo.
El explorador se basó en una ingeniería que permitió que operara de manera autónoma sobre la superficie lunar, con diversos sensores y software de procesamiento de imágenes para poder recorrer su entorno. Además, el SORA-Q estaba equipado con un avanzado sistema de detección de anomalías y mecanismos de recuperación que permitían que identificara fallos en su propio sistema.
Con sus cámaras, el SORA-Q tomó 12 imágenes en alta resolución en la superficie lunar. El trabajo señala, sin embargo, que parte de los datos se perdieron durante la transmisión a la Tierra.
Tras rodear al alunizador SLIM, el SORA-Q perdió el contacto con el LEV-1, muy probablemente porque se agotó su batería. Su misión se consideró exitosa, y este explorador podría servir como inspiración para el diseño de futuros exploradores en miniatura en misiones a otros planetas.
Los investigadores del estudio señalan que la capacidad de un solo explorador sobre la superficie de la Luna o Marte sería limitada debido a que el tamaño reducido limita la cantidad de instrumentos y funciones computarizadas que pueden tener a bordo. Pero de todos modos, afirman que estos robots del tamaño de una pelota pequeña, podrían acompañar a sus contrapartes más grandes, similares al explorador perseverance de la NASA, y al helicóptero Ingenuity en Marte.
Como asistentes, los pequeños robots podrían usarse para acceder a lugares inaccesibles como chimeneas estrechas y cráteres que de otro modo están fuera del alcance de los robots más tradicionales. Si se combina la confiabilidad y potencia de los robots de mayor tamaño con la flexibilidad y peso liviano de estos compañeros pequeños, tendríamos más acceso a más información. Sería como llevar un acompañante pequeño con ojos que pueden llegar allí donde los nuestros no pueden ver.