
Durante años, la robótica pareció obsesionada con una pregunta: ¿a qué animal debería parecerse una máquina para moverse mejor? Algunos laboratorios apostaron por perros metálicos. Otros por insectos, caballos, serpientes o humanoides con piernas cada vez más sofisticadas. La naturaleza era el molde. El robot, una imitación.
Pero un equipo de la Universidad de Duke decidió plantear otra pregunta: ¿y si el cuerpo más útil para un robot no se parece a ningún animal familiar?
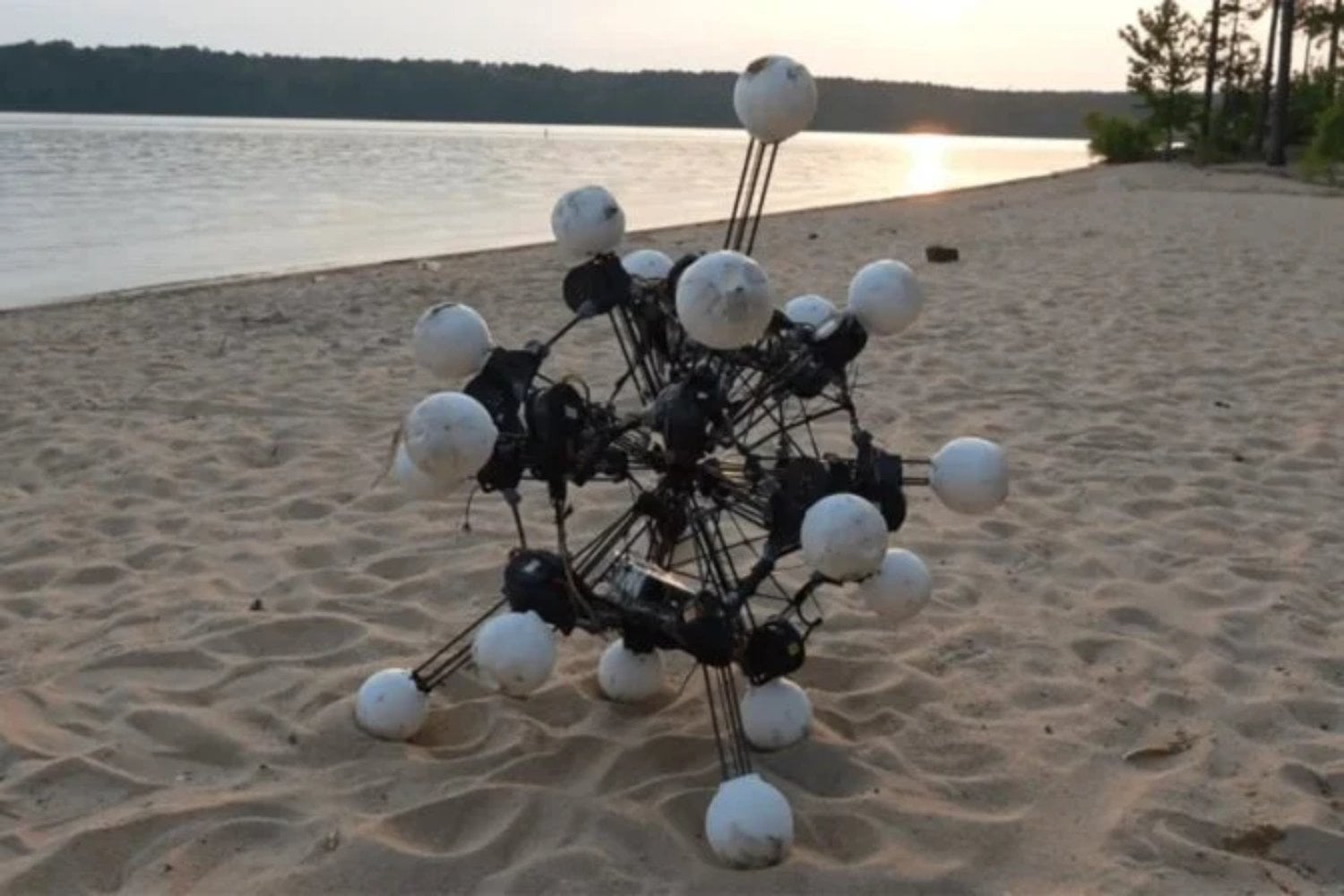
La respuesta se llama Argus. Es una máquina extraña, casi marina, con 20 patas telescópicas que irradian desde un cuerpo central y cámaras de profundidad en las puntas. No tiene frente ni espalda. Tampoco un “arriba” o un “abajo” definitivos. Puede moverse y ver en cualquier dirección casi al instante, como si el mundo no le exigiera orientarse antes de actuar. La investigación fue publicada en Science Robotics bajo el título Extreme dynamic symmetry enables omnidirectional and multifunctional robots.
El secreto no está en tener muchas patas, sino en no depender de una dirección
Argus no nació de copiar a un erizo de mar, aunque lo recuerde visualmente. Nació de una idea matemática: la isotropía dinámica. El concepto mide qué tan bien puede un robot acelerar su centro de masa en cualquier dirección. Una puntuación de 1 significa que la máquina puede reaccionar de forma casi idéntica hacia delante, atrás, arriba, abajo o hacia los lados.
La mayoría de robots actuales no se acercan demasiado a ese ideal. Según los investigadores, humanoides, cuadrúpedos y drones convencionales suelen quedar por debajo de 0,6 en esa métrica. Argus alcanzó 0,91, una cifra cercana al máximo teórico.
Eso cambia la manera de pensar el control. Un perro robot necesita saber dónde está su frente. Un humanoide también. Argus, en cambio, puede tratar casi cualquier orientación como válida. Si cae, gira o recibe un golpe, no tiene que “recuperar la postura correcta” de la misma manera que otros robots. Puede convertir otra parte de su cuerpo en base y seguir.
Más de 1.000 simulaciones antes de llegar al cuerpo extraño
El equipo de Duke no llegó a esta forma por capricho. En el estudio, los investigadores probaron más de 1.000 morfologías simuladas y observaron que una mayor simetría dinámica mejoraba el seguimiento de trayectorias, el éxito en tareas, la robustez, la resiliencia y la eficiencia energética.
Para explorar ese extremo, diseñaron una familia de robots Argus con actuadores lineales orientados radialmente. La versión física más llamativa fue la de 20 patas. Su cuerpo se organiza alrededor de una geometría cercana a un dodecaedro regular, una forma de 12 caras pentagonales que ayuda a distribuir extremidades y sensores de manera uniforme.
El resultado parece raro porque no está pensado para gustarle a nuestros ojos. Está pensado para que la máquina no dependa de una cara principal. En robótica, eso puede ser una ventaja enorme cuando el entorno es caótico: escombros, cuevas, bosques, arena, estructuras colapsadas o superficies donde no hay un camino claro.
En las pruebas reales, Argus atravesó terrenos difíciles y siguió funcionando con patas dañadas
La parte más convincente del proyecto llegó fuera de las simulaciones. Argus fue probado en el campus de Duke sobre concreto, hierba, vegetación densa, arena blanda, superficies húmedas y corteza de árbol. También superó obstáculos de unos 12,7 centímetros, empujó un cubo de un metro y siguió funcionando incluso después de perder varias patas o sufrir fallos parciales de actuadores.
Associated Press también destacó una de sus capacidades más llamativas: puede trepar entre paredes usando sus patas y cámaras distribuidas, sin depender de una orientación frontal tradicional.
Ese punto es clave. Muchos robots son impresionantes en demostraciones limpias, pero se vuelven torpes cuando el mundo deja de comportarse como una pista de pruebas. Argus apunta justo a lo contrario: aceptar que el mundo real empuja, golpea, ensucia, bloquea y desordena.
No es el robot definitivo, pero sí una pista sobre cómo diseñar los próximos
Conviene matizar el entusiasmo. Argus no significa que todos los robots del futuro tendrán 20 patas ni que la forma humanoide esté condenada. Para manipular herramientas humanas, subir escaleras diseñadas para humanos o trabajar en entornos construidos para nuestro cuerpo, los humanoides siguen teniendo sentido.
Lo que demuestra Argus es otra cosa: quizá la robótica lleva demasiado tiempo preguntándose qué animal copiar, cuando podría preguntar qué geometría necesita una tarea. Si la misión es moverse en cualquier dirección, estabilizarse rápido, operar en terrenos impredecibles y sobrevivir a daños, la forma óptima puede parecerse menos a un perro y más a una esfera con patas.
Los propios autores lo presentan como una prueba de concepto y una herramienta de diseño, no como una respuesta final. Su importancia está en ofrecer una métrica para comparar cuerpos robóticos desde cero: cuánta capacidad real tiene una máquina para actuar sin depender de una orientación privilegiada.
La próxima gran revolución robótica podría ser dejar de parecerse a nosotros
Hay algo casi incómodo en Argus. No es elegante en el sentido clásico. No inspira ternura como un perro robot ni inquietud como un humanoide. Parece una criatura de fondo marino fabricada en un laboratorio de ingeniería. Pero precisamente ahí está su fuerza.
Durante décadas, imaginamos robots como versiones mecánicas de seres vivos conocidos. Argus sugiere que la siguiente etapa puede ser menos imitativa y más matemática. Robots diseñados no por parecido, sino por capacidades. No por tener una cara, sino por no necesitarla.
Quizá el cuerpo robótico ideal no camina hacia delante. Quizá simplemente se mueve, desde cualquier lado, porque para él todas las direcciones son igual de posibles.





